")
Робототехника всегда привлекала людей и многие ученые пытались воссоздать механическое подобие живых организмов. С Arduino компонентами сделать робота оказалось очень просто и доступно, даже начинающим изучать робототехнику.
Мы подготовили простой проект для прокачки ваших навыков начинающего инженера. Создадим симпатичного паука-робота, который будет управляться с ИК-пульта.
Для реализации проекта нам понадобится:
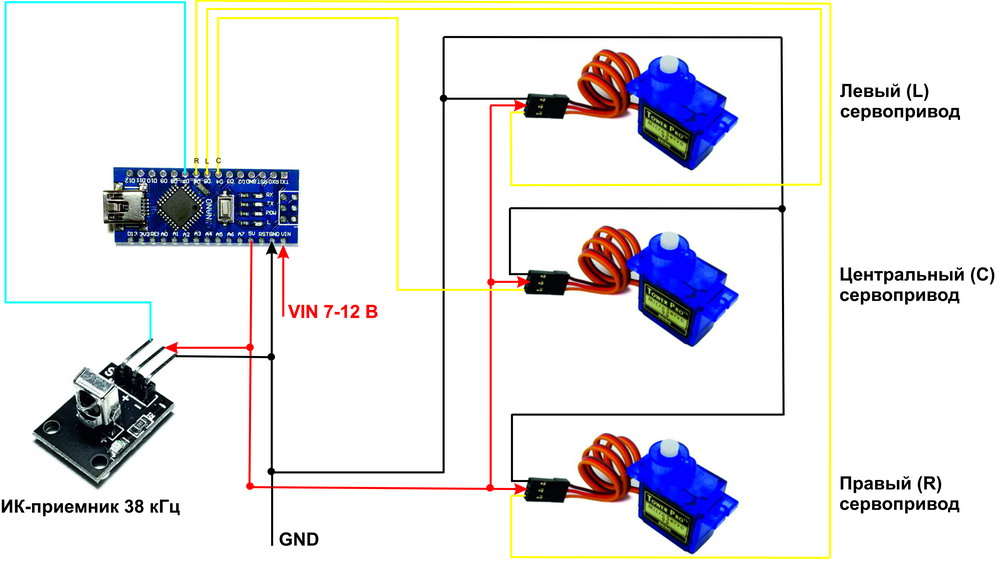
- Сервоприводы SG90 (180 град) – 3 шт. Посмотреть их можно здесь.
- Микроконтроллер NANO0 CH340G – 1 шт. Или любой другой совместимый Arduino контроллер. Посмотреть можно здесь.
- ИК-пульт с приёмником – 1 шт. Посмотреть можно по этой ссылке.
Если захотите модернизировать паучка, то можно использовать ультразвуковой датчик измерения расстояния HC-SR04, который позволит арахниду самостоятельно бегать и обходить препятствия. Для этого мы поместили УЗ-датчик на мордочку паука – это глаза арахнида.
Вам предстоит собрать простую схему:
А теперь о конструктивных особенностях:
- Расположение сервоприводов.
Большинство игрушек используют более трёх сервоприводов, наш арахнид приводится в движение тремя сервоприводами. Для того, чтобы паук передвигался, расположите сервоприводы следующим образом:
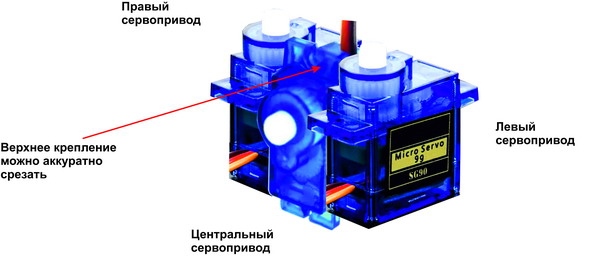
Верхнее крепление центрального сервопривода можно аккуратно срезать, чтобы оно не мешало движению левого и правого сервопривода.
2. Тело паука может быть в виде батарейного отсека на два аккумулятора типа 18650. Таких аккумуляторов вполне хватит чтобы арахнид хорошо и долго работал. Закрепите сервоприводы на батарейном отсеке, как показано на рисунке ниже:
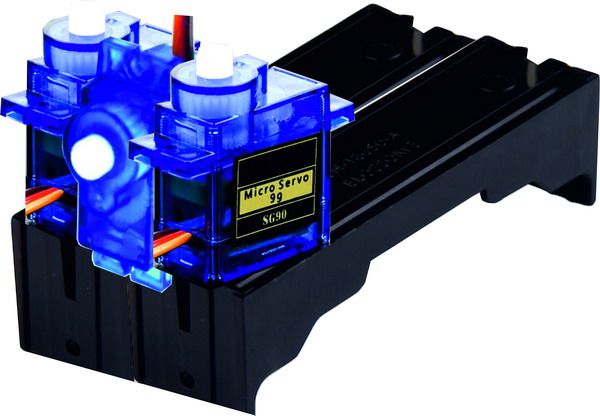
Мы использовали батарейный отсек на два аккумулятора типа 18650, который вы найдёте по этой ссылке. И аккумулятор LG 18650MH1 3200mAh Li-ion без защиты, которые можно посмотреть здесь. Этих аккумуляторов хватит, чтобы запитать сервоприводы и микроконтроллер.
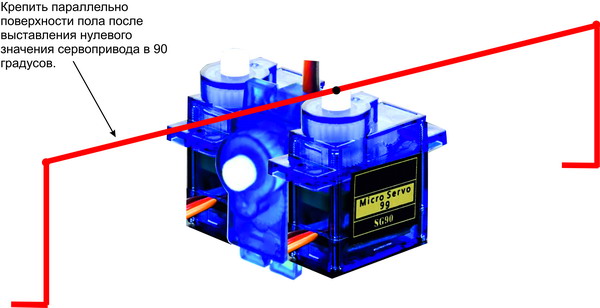
3. Теперь необходимо разместить ноги паука. Их можно изготовить из прочной проволоки и закрепить на фурнитуру, которая идёт в комплекте с сервоприводами. Здесь мы схематично покажем, как должны быть размещены ноги арахнида.

Прежде, чем прикрепить ноги паука, необходимо выставить начальные углы сервоприводов - так называемое нулевое положение, которое для всех сервоприводов равно 90 градусов. Для этого соберите схему и загрузите скетч в память микроконтроллера. В скетче все настройки уже прописаны. После загрузки скетча сервоприводы установятся в нулевое положение.
Аналогичным образом крепим левые и правые ноги паука.
Декорируйте ноги паука и его тело так, как вам нравится и у вас появится замечательная игрушка.
Особенности программирования:
Для того, чтобы роботом можно было управлять, необходимо задать управляющие коды ИК-пульта. Откройте среду разработки Arduino и загрузите скетч паука-робота. Для простоты создана отдельная библиотека команд ir_command_codes.h, в которой необходимо прописать коды кнопок вашего ИК-пульта. При загрузке скетча она автоматически подключается, и вы увидите вкладку ir_command_codes.h.

Перейдя в эту вкладку, вы увидите название управляющих команд и цифры. Цифры - это код кнопок ИК-пульта. Вам его необходимо поменять на тот, который генерирует ваш ИК-пульт.

Загрузите скетч в микроконтроллер, затем откройте Монитор порта, нажав клавиши Ctrl-Shift-M, или через меню Инструменты>>>Монитор порта. Контроллер должен быть подсоединён к компьютеру.
Нажимая поочерёдно на кнопки ИК-пульта, вы увидите на экране цифровой код. Например, нажав на клавишу «ВПРАВО» увидите набор цифр «5678901234». Эти цифры могут быть другими. Поменяйте цифры в скетче на код ваших кнопок пульта. Сохраните скетч и снова скомпилируйте его, загрузив в микроконтроллер.
Теперь, когда Вы нажмете на ИК-пульте кнопку «ВПРАВО», ваш арахнид побежит вправо и т.д.
Игрушка готова. Вы можете её модернизировать на ваше усмотрение. Приятного Вам времяпрепровождения)))
Скетч для паука можно скачать по этой ссылке.
Библиотека для ИК – пульта и приёмника IRremote.hpp здесь.










Комментарии